












Konsultasyon ng produkto
Ang iyong email address ay hindi mai -publish. Ang mga kinakailangang patlang ay minarkahan *$


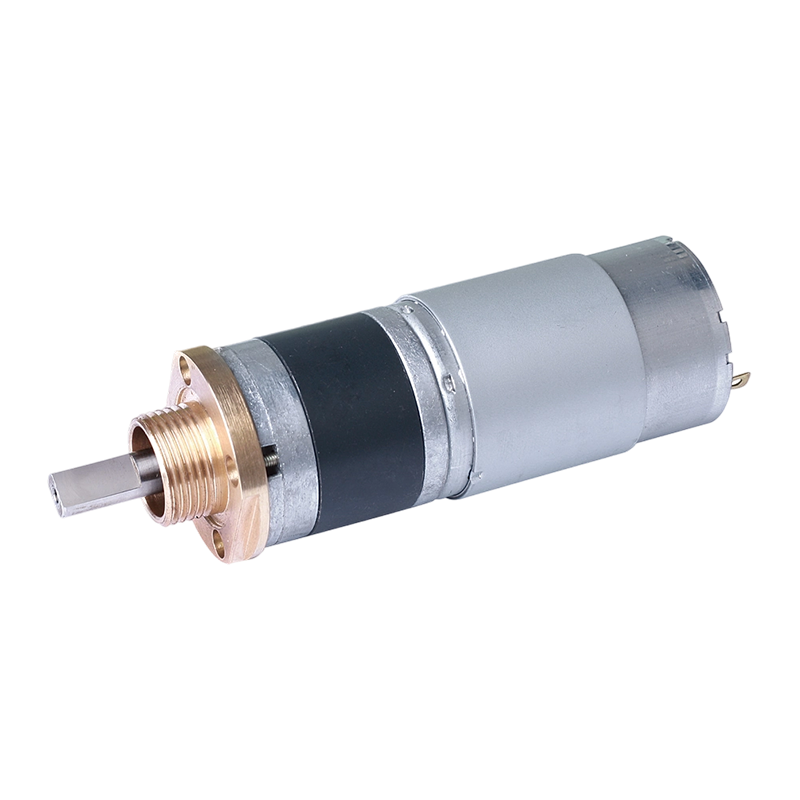
Ang DC gear motor ay isang direktang kasalukuyang de-koryenteng motor na ipinares sa isang mekanikal na gearbox sa isang pinagsamang unit. Ang motor mismo ay umiikot nang mabilis — madalas na 3,000 hanggang 15,000 RPM sa rate na boltahe — ngunit karamihan sa mga real-world na application ay nangangailangan ng mabagal, kinokontrol na paggalaw na may malaking puwersa ng pag-ikot. Nilulutas ito ng gearbox sa pamamagitan ng bilis ng pangangalakal para sa torque sa pamamagitan ng isang serye ng mga meshing gear. Ang resulta ay isang output shaft na lumiliko nang mas mabagal kaysa sa rotor ng motor, ngunit may proporsyonal na mas mataas na torque na magagamit sa baras.
Kung wala ang gearbox, ang isang maliit na DC motor ay madaling paikutin ang isang fan blade ngunit nagpupumilit na iangat ang isang load, magmaneho ng conveyor belt, o pumihit ng balbula. Sa pagbabawas ng gear na, halimbawa, 100:1, ang parehong motor na gumagawa ng 5 mN·m ng free-running torque ay naghahatid na ngayon ng humigit-kumulang 500 mN·m sa output — binawasan ang mga pagkalugi mula sa gear mesh friction, karaniwang 5–20% depende sa uri ng gear at lubrication. Ang multiplikasyon ng torque na iyon, na sinamahan ng compact na pagsasama ng motor at gearbox sa isang assembly, ang dahilan kung bakit ang DC geared na motor ay kabilang sa mga pinaka-tinatanggap na tinukoy na mga bahagi ng paggalaw sa mga pang-industriya, komersyal, at mga consumer na aplikasyon.
Ang disenyo ng gearbox ay may mas malaking epekto sa pagganap, laki, kahusayan, at ingay kaysa sa halos anumang iba pang variable ng disenyo. Apat na pagsasaayos ang nangingibabaw sa merkado.
Ang mga spur gear ay may mga tuwid na ngipin na hiwa parallel sa shaft axis. Ang mga ito ang pinakasimple at hindi gaanong mahal na uri ng gear na gagawin, na ginagawang default na pagpipilian ang spur gear DC motors para sa mga application na sensitibo sa gastos. Ang kanilang pangunahing kahinaan ay ang ingay: dahil ang buong lapad ng ngipin ay nakikibahagi nang sabay-sabay sa bawat pakikipag-ugnay sa mesh, ang mga spur gear ay gumagawa ng isang katangian ng clatter sa mataas na bilis. Mahusay ang kahusayan — karaniwang 95–98% bawat yugto — at maayos nilang pinangangasiwaan ang mga katamtamang radial load. Ang mga spur gear motor ay karaniwan sa mga printer, laruan, vending machine, at light-duty actuator kung saan ang tahimik na operasyon ay hindi priyoridad.
Ang isang planetary gearbox ay nag-aayos ng maraming "planet" na gear sa paligid ng isang gitnang "sun" gear, lahat ay nasa loob ng isang ring gear. Dahil ang load ay ibinabahagi sa ilang planeta gear nang sabay-sabay, ang isang planetary DC gear motor ay naghahatid ng napakataas na torque density sa isang compact, coaxial package. Ang output shaft ay nakahanay sa motor shaft, na pinapasimple ang pag-install sa space-constrained na mga layout. Ang mga planetary gearbox ay mas matigas at mas tumpak kaysa sa mga uri ng spur o worm, na ginagawa itong mas pinili para sa mga robotics, automated guided vehicles (AGVs), electric screwdriver, at anumang application na nangangailangan ng mataas na torque, mahigpit na positional accuracy, at mahabang buhay ng serbisyo. Ang tradeoff ay gastos: ang mga planetary gearbox ay makabuluhang mas mahal upang makagawa kaysa sa spur o helical na mga uri sa parehong torque rating.
Gumagamit ang worm gearbox ng parang tornilyo na worm shaft na nagme-meshes sa worm wheel sa 90-degree na anggulo. Nakakamit ng configuration na ito ang napakataas na reduction ratios sa isang yugto — karaniwang 5:1 hanggang 100:1 — at nagbibigay ng natural na self-locking na katangian: kapag huminto ang motor, hindi na maibabalik ng load ang gearbox. Ginagawa nitong perpekto ang worm gear DC motors para sa mga application kung saan ang load ay dapat humawak sa posisyon na walang power, gaya ng mga openers ng pinto ng garahe, stage lift, hospital bed actuator, at mga hadlang sa seguridad. Ang pangunahing limitasyon ay kahusayan: mataas ang friction ng worm gear mesh, na may tipikal na single-stage na kahusayan mula 50–90% depende sa anggulo ng lead, na may mas matataas na ratio na unti-unting hindi gaanong mahusay. Ang mga worm gear motor ay gumagawa din ng malaking init sa ilalim ng tuluy-tuloy na high-load duty cycle.
Ang mga helical gear ay may mga ngipin na pinutol sa isang anggulo sa shaft axis, kaya ang contact sa pagitan ng mga ngipin ay unti-unti at progresibo sa halip na biglaan. Ito ay kapansin-pansing binabawasan ang ingay at panginginig ng boses kumpara sa mga spur gear at bahagyang nagpapabuti sa kapasidad ng pagkarga dahil sa mas malaking epektibong lugar ng pakikipag-ugnayan. Ang mga helical DC gear motor ay karaniwan sa mga application na nangangailangan ng mas tahimik na operasyon — conveyor drive, packaging machinery, at medikal na kagamitan. Ang mga kumbinasyon ng helical-bevel ay nagpapahintulot sa output shaft na ma-offset sa 90 degrees sa motor, katulad ng isang worm drive ngunit may mas mataas na kahusayan (karaniwang 94–97% bawat yugto). Ang tumaas na axial thrust na nabuo ng helical gear mesh ay nangangailangan ng mga bearings na kayang hawakan ang load na ito, na bahagyang nagdaragdag sa halaga ng unit.
Ang elemento ng DC motor mismo ay may dalawang pangunahing arkitektura, at ang pagpili sa pagitan ng mga ito ay nakakaapekto sa gastos, mga kinakailangan sa pagpapanatili, saklaw ng bilis, at buhay ng serbisyo nang malaki.
| Tampok | Brushed DC Gear Motor | Brushless DC Gear Motor (BLDC) |
| Paraan ng Commutation | Mechanical (carbon brushes commutator) | Electronic (ESC o driver ng motor) |
| Karaniwang Buhay ng Serbisyo | 500–3,000 oras (limitado ang pagsusuot ng brush) | 10,000–20,000 oras |
| Kontrolin ang pagiging kumplikado | Simple — direktang boltahe o PWM | Nangangailangan ng dedikadong BLDC driver/ESC |
| Kahusayan | 75–85% karaniwan | 85–95% karaniwan |
| Ingay at EMI | Mas mataas (Brush arcing ay bumubuo ng EMI) | Ibaba |
| Gastos ng Yunit | Ibaba | Mas mataas (motor driver) |
| Mga Karaniwang Aplikasyon | Mga laruan, appliances, light automation | Robotics, AGV, medikal na device, EV |
Para sa prototyping o low-duty intermittent applications, ang isang brushed DC gear motor na pinapatakbo ng isang simpleng L298N o TB6612FNG H-bridge ay ang pinakamabilis, pinakamurang ruta patungo sa isang gumaganang sistema. Para sa anumang bagay na patuloy na tumatakbo, gumagana sa isang malupit na kapaligiran, o dapat tumagal ng mga taon sa field nang walang maintenance, isang brushless DC gear motor — sa kabila ng mas mataas na upfront cost at karagdagang driver electronics — halos palaging naghahatid ng mas mahusay na kabuuang halaga ng pagmamay-ari.
Ang mga datasheet ng DC gear motor ay maaaring siksik, ngunit limang parameter ang tumutukoy kung gagana ang isang motor sa iyong aplikasyon. Ang pag-unawa sa bawat isa ay pumipigil sa mga pinakakaraniwang pagkakamali sa pagpili.
Mga DC gear motor ay idinisenyo para sa isang partikular na boltahe ng supply — pinakakaraniwang 6V, 12V, 24V, o 48V sa mga pang-industriya at libangan na aplikasyon. Ang pagpapatakbo ng motor na mas mataas sa rate ng boltahe nito ay nagpapabilis sa pagkasuot ng brush sa mga uri ng brushed, nagpapainit ng mga windings, at nagpapaikli sa buhay ng bearing. Ang pagpapatakbo sa ibaba ng rate ng boltahe ay nakakabawas sa magagamit na torque at maaaring maging sanhi ng paghinto ng motor sa ilalim ng pagkarga. Para sa mga system na pinapagana ng baterya, itugma ang na-rate na boltahe ng motor sa nominal na boltahe ng pack ng baterya sa kalagitnaan ng pag-charge, hindi sa full charge, upang maiwasan ang overvoltage sa tuktok ng ikot ng pag-charge. Ang isang 12V DC gear motor na tumatakbo mula sa isang bagong-charge na 3S LiPo (12.6V) ay bahagyang katanggap-tanggap; Ang pagpapatakbo nito mula sa isang 4S pack (16.8V) ay mabilis na masisira ito.
Ang walang-load na bilis ay ang output shaft RPM kapag ang motor ay tumatakbo sa rate na boltahe na may zero na inilapat na metalikang kuwintas. Sa ilalim ng aktwal na pagkarga, bumababa ang bilis — karaniwan nang 10–20% sa na-rate (tuloy-tuloy) na torque, at hanggang 50% sa peak stall torque. Kapag kinakalkula kung ang isang DC geared motor ay maaaring ilipat ang isang load sa kinakailangang bilis, palaging gamitin ang load speed sa iyong inaasahang torque operating point, hindi ang walang-load na figure. Ang mga tagagawa kung minsan ay naglilista lamang ng walang-load na bilis at stall torque; ang na-load na operating point ay halos bumabagsak sa gitna ng speed-torque curve.
Ang na-rate na metalikang kuwintas (tinatawag ding tuloy-tuloy na metalikang kuwintas) ay ang pinakamataas na metalikang kuwintas na maihahatid ng motor nang walang katiyakan nang walang labis na pag-init. Ang stall torque ay ang pinakamataas na torque na nalilikha kapag ang baras ay nakatigil - karaniwang 5-10 beses ang na-rate na torque para sa isang brushed DC gear motor. Ang stall torque ay kapaki-pakinabang para sa pag-size ng mga pasulput-sulpot na peak load (halimbawa, ang puwersa na kailangan para masira ang naka-stuck na balbula), ngunit ang patuloy na pagpapatakbo sa o malapit sa stall ay magpapainit nang mabilis sa motor. Pumili ng motor na ang na-rate na torque ay hindi bababa sa 20–30% na mas mataas sa inaasahang tuluy-tuloy na load torque ng iyong application. Ang margin ng kaligtasan na ito ay tumutukoy sa pagkakaiba-iba ng friction, boltahe sag, at pagbaba ng temperatura.
Ang ratio ng gear ay nagpapahayag kung gaano karaming mga rebolusyon ng motor shaft ang gumagawa ng isang rebolusyon ng output shaft. Ang ratio na 50:1 ay nangangahulugan na ang output ay lumiliko nang isang beses para sa bawat 50 na pagliko ng motor. Ang mas mataas na gear ratio ay gumagawa ng mas mababang bilis ng output at mas mataas na output torque. Gayunpaman, ang napakataas na ratio ay nagpapakilala ng higit pang mga yugto ng gear, na nagpapataas ng friction losses at backlash — ang maliit na halaga ng libreng paglalaro sa output shaft kapag ang direksyon ay bumaligtad. Para sa mga application sa pagpoposisyon, ang backlash ay isang kritikal na detalye: ang mga planetary gearbox ay karaniwang nag-aalok ng 0.5–3 arc-minutes ng backlash sa mga precision grade, habang ang mga economy spur gearbox ay maaaring may 1-5 degrees ng backlash, na hindi katanggap-tanggap para sa anumang nangangailangan ng paulit-ulit na pagpoposisyon.
Inilalarawan ng duty cycle ang porsyento ng oras na umaandar ang isang motor kumpara sa pahinga sa loob ng isang partikular na yugto ng pag-ikot. Ang isang motor na na-rate para sa S1 (tuloy-tuloy na tungkulin) ay maaaring tumakbo nang walang katiyakan sa na-rate na load nang hindi nag-overheat. Ang mga rating ng S2 (short-time duty) at S3 (intermittent periodic duty) ay nagbibigay-daan sa mas mataas na peak power level dahil lumalamig ang motor sa mga off period. Palaging itugma ang rating ng tungkulin ng motor sa iyong aktwal na ikot ng pagpapatakbo — ang motor na na-rate para sa 30% na duty cycle ay mag-o-overheat at mabibigo kung patuloy na tatakbo, kahit na ang torque at bilis ay nasa mga limitasyon ng nameplate.
Ang pagpili ng boltahe ay kadalasang hinihimok ng magagamit na pinagmumulan ng kuryente sa halip na sa pamamagitan ng kagustuhan ng motor, ngunit ang pag-unawa sa karaniwang mga kaso ng paggamit para sa bawat tier ng boltahe ay nakakatulong na paliitin ang iyong mga opsyon nang mabilis.
Ang tamang pagpili ng motor sa unang pagkakataon ay maiiwasan ang magastos na muling pagdidisenyo at mga pagkabigo sa field. Sundin ang praktikal na balangkas na ito:
Kalkulahin ang torque na kailangan ng iyong aplikasyon sa output shaft. Para sa isang gulong na robot, nangangahulugan ito ng pag-compute ng puwersa na kailangan upang mapabilis ang masa ng robot, mapagtagumpayan ang rolling friction, at umakyat sa anumang incline na inaasahan sa operasyon. Para sa isang linear actuator, kalkulahin ang puwersa sa lead screw at i-convert ito sa motor torque sa pamamagitan ng lead at efficiency ng screw. Magdagdag ng 25–50% na margin sa kaligtasan upang isaalang-alang ang pagkakaiba-iba ng friction, pagtanda, at pinakamasamang sitwasyon sa pag-load. Ang target na torque number na ito — na may nakalapat na margin — ay nagiging iyong minimum na na-rate na detalye ng torque.
Itakda ang minimum at maximum na bilis ng output shaft na kailangan ng iyong aplikasyon. Ang conveyor na gumagalaw ng produkto sa 0.5 m/s na may 50 mm diameter na drive roller ay nangangailangan ng bilis ng output na humigit-kumulang 191 RPM (0.5 / (π × 0.05) × 60). Pumili ng motor na ang bilis ng walang load ay hindi bababa sa 15–20% sa itaas ng kinakailangang bilis ng pag-load upang matiyak na ang motor ay hindi umaandar malapit sa stall sa ilalim ng normal na mga kondisyon.
Gamitin ang sumusunod na gabay sa pagpapasya upang itugma ang uri ng gearbox sa mga kinakailangan sa aplikasyon:
Suriin na ang iyong power supply ay maaaring maghatid ng pinakamataas na kasalukuyang demand ng motor sa stall. Ang stall current para sa isang brushed DC gear motor ay karaniwang 5–10 beses ang no-load current. Kung hindi maaaring pagmulan ng iyong supply ang kasalukuyang ito nang panandalian sa panahon ng startup o mga kondisyon ng jam, magdagdag ng kasalukuyang naglilimita sa motor driver na may adjustable na limitasyon sa kasalukuyang, o pumili ng motor driver na may sapat na headroom. Para sa mga motor na walang brush na DC gear, kumpirmahin na ang tuluy-tuloy at pinakamataas na rating ng driver ng BLDC ay lumampas sa mga kinakailangan ng motor na may hindi bababa sa 20% na margin.
Ang mga karaniwang DC gear motor ay hindi selyado. Kung ang motor ay malantad sa alikabok, moisture, coolant splash, o washdown na mga kondisyon, tukuyin ang isang IP-rated na unit — IP54 para sa proteksyon ng alikabok at splash, IP65 o IP67 para sa mas mahirap na kapaligiran. Para sa food processing, pharmaceutical, o marine application, kumpirmahin na ang gearbox lubricant ay nakakatugon sa mga naaangkop na kinakailangan sa regulasyon (NSF H1 food-grade grease para sa food contact zone, halimbawa). Mahalaga rin ang saklaw ng operating temperature: ang mga karaniwang motor ay na-rate para sa 0–40°C ambient; para sa mga cold-store warehouse o outdoor installation sa Northern climates, kumpirmahin ang low-temperature grease specifications at winding temperature ratings.
Lumilitaw ang mga DC geared na motor sa napakalaking hanay ng mga produkto at system. Ang pag-unawa kung saan karaniwang ginagamit ang mga ito ay nakakatulong na matukoy ang naaangkop na mga disenyo ng sanggunian at napatunayang mga pagsasaayos.
| Industriya | Application | Karaniwang Uri ng Motor ng Gear |
| Robotics at AGV | Mga gulong sa pagmamaneho, joint actuation, mga mekanismo ng gripper | Walang brush na planetary, 24V–48V |
| Industrial Automation | Conveyor, indexing table, valve actuator | Helical, worm, o planetary, 24V |
| Mga Medical Device | Mga infusion pump, mga surgical tool, mga kama sa ospital | Brushless planetary, low-backlash, 12V–24V |
| Automotive | Mga power window, seat adjuster, sunroof drive | Brushed worm o spur, 12V |
| Consumer Electronics | Pan/tilt ng camera, mga smart home actuator, mga printer | Brushed spur, 5V–12V |
| Agrikultura | Kontrol ng balbula ng patubig, mga mekanismo ng seeding | IP-rated na worm o planetary, 12V–24V |
| Building Automation | HVAC damper, blind actuator, door drive | Brushless helical o worm, 24V |
Ang mga DC gear motor ay angkop sa variable-speed na operasyon dahil ang bilis ng DC motor ay direktang proporsyonal sa inilapat na boltahe. Sa pagsasagawa, ang bilis ay kinokontrol ng isa sa tatlong pamamaraan.
Ang PWM ay ang karaniwang paraan para sa pagkontrol ng brushed DC gear motors mula sa mga microcontroller, PLC, at motor driver IC. Ino-on at pinapatay ng driver ang supply ng motor sa isang nakapirming frequency — karaniwang 1–20 kHz — at ang duty cycle (ang porsyento ng oras na naka-on ang supply) ay tumutukoy sa average na boltahe at samakatuwid ay ang bilis. Ang 50% duty cycle sa 12V ay naghahatid ng humigit-kumulang 6V na katumbas ng motor. Ang kontrol ng PWM ay mahusay dahil ang mga lumilipat na transistor ay gumugugol ng halos lahat ng kanilang oras nang buo o ganap na naka-off, na pinaliit ang resistive na pagkalugi. Ang mga frequency ng PWM na mas mababa sa 1 kHz ay maaaring maging sanhi ng naririnig na pag-ungol ng motor habang ang mga paikot-ikot na armature ay nag-vibrate sa frequency ng switching; ang mga frequency na higit sa 20 kHz ay itinutulak ito sa itaas ng naririnig na saklaw. Para sa brushed DC gear motors, ang PWM frequency na 10–20 kHz ay isang karaniwang praktikal na pagpipilian.
Para sa mga application na nangangailangan ng tumpak, pare-parehong bilis anuman ang pagkakaiba-iba ng load — mga robotic platform, tape drive, precision dispensing — isang rotary encoder na naka-mount sa motor shaft o output ng gearbox ay nagbibigay ng real-time na feedback sa bilis sa isang PID controller. Inihahambing ng controller ang aktwal na bilis sa setpoint at inaayos ang PWM duty cycle upang makabawi. Ang mga encoder para sa DC gear motor ay karaniwang mga quadrature na optical o magnetic hall-effect na mga uri, na may mga resolusyon mula 6 hanggang ilang libong bilang bawat rebolusyon depende sa mga kinakailangan sa katumpakan. Maraming mga supplier ng DC gear motor ang nag-aalok ng pinagsama-samang mga opsyon sa encoder bilang karaniwang mga item ng catalog, na lubos na nagpapasimple sa pagsasama ng hardware.
Sa mga simpleng sistema kung saan medyo pare-pareho ang pagkarga at hindi kritikal ang katumpakan ng bilis, maaaring itakda ang bilis sa pamamagitan ng pagsasaayos ng boltahe ng supply na may variable na DC power supply o isang linear voltage regulator. Ang diskarte na ito ay ang pinakamaliit na kahusayan — ang isang linear na regulator ay nagwawaldas ng pagbaba ng boltahe bilang init — at nag-aalok ng walang bayad sa pagkarga, ngunit ito ang pinakasimpleng pagpapatupad at angkop para sa mga bangko ng pagsubok, manu-manong pagsasaayos ng bilis, at napakababang kapangyarihan na mga aplikasyon kung saan ang thermal dissipation sa regulator ay hindi isang alalahanin.
Ang pag-unawa kung ano ang nagiging sanhi ng pagkabigo ng isang DC gear motor ay nakakatulong sa iyo na magdisenyo ng mga system na nagpapahaba ng mga agwat ng serbisyo at nakakakuha ng mga problema bago sila magdulot ng hindi planadong downtime.
Ang iyong email address ay hindi mai -publish. Ang mga kinakailangang patlang ay minarkahan *$
Copyright © Zhejiang Dongzheng Motor Co., Ltd. Nakalaan ang lahat ng mga karapatan.
 Ang mga tagagawa ng DC Gear Motor
Ang mga tagagawa ng DC Gear Motor